 The German Service Robotics Initiative (DESIRE) is a cooperation of industry (Kuka, Schunk, Siemans, GPS, InMach, NeoBotix, L-1 Identity Solutions), research institutes (DLR, FZI, FhG IPA, FhG IAIS) and leading universities (Bochum, Freiburg, Bielefeld).
The German Service Robotics Initiative (DESIRE) is a cooperation of industry (Kuka, Schunk, Siemans, GPS, InMach, NeoBotix, L-1 Identity Solutions), research institutes (DLR, FZI, FhG IPA, FhG IAIS) and leading universities (Bochum, Freiburg, Bielefeld).
 In Bielefeld, work is carried out on a bimanual anthropomorphic platform including the torso BARTHOC as a communication partner. We study interactive robot learning within a object learning scenario, i.e. labeling, grasping, and removing objects, aiming at a more natural human-robot cooperation. In particular, our research focuses on
In Bielefeld, work is carried out on a bimanual anthropomorphic platform including the torso BARTHOC as a communication partner. We study interactive robot learning within a object learning scenario, i.e. labeling, grasping, and removing objects, aiming at a more natural human-robot cooperation. In particular, our research focuses on
- bimanual action representation and execution
- tactile sensors and manipulation based on tactile feedback
- online-learning object detection
- integration and coordination of perception and action
- principles of human-robot dialog, including non-verbal communication
- combination of exploratory and guided learning
read more »























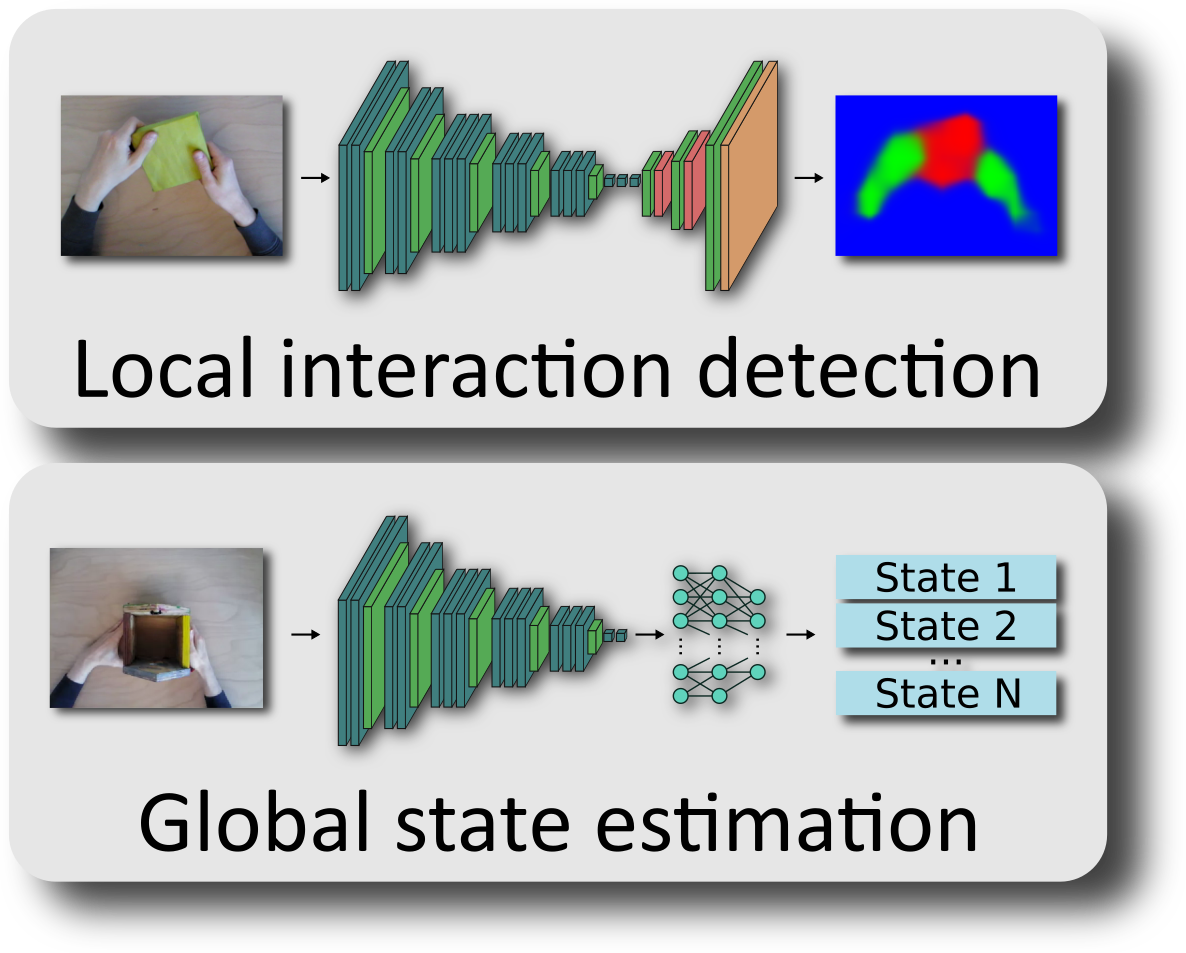 The visual detection and recognition of human actions by technical systems is a fundamental problem with many applications the human-computer interaction domain. Activities involving hand-object interactions and action sequences in goal-oriented tasks, such as manufacturing work, pose a particular challenge. We use deep learning to detect and recognize such actions in real-time, and we propose an assistance system that provides the user with feedback and guidance based on the recognized actions.
The visual detection and recognition of human actions by technical systems is a fundamental problem with many applications the human-computer interaction domain. Activities involving hand-object interactions and action sequences in goal-oriented tasks, such as manufacturing work, pose a particular challenge. We use deep learning to detect and recognize such actions in real-time, and we propose an assistance system that provides the user with feedback and guidance based on the recognized actions. Computer Vision and processing of multimodal sensor data is very important to take Smart Homes to the next level. An intelligent everyday environment should be aware of its residents. It should understand their actions and ideally even be able to predict their behavior. In the
Computer Vision and processing of multimodal sensor data is very important to take Smart Homes to the next level. An intelligent everyday environment should be aware of its residents. It should understand their actions and ideally even be able to predict their behavior. In the  The spatio-temporal contact pattern during manipulation is a valuable source of information about object identity and object state, especially in uncertain environments. Using a bimanual robot manipulator setup with two 256 "pixel" touch sensor arrays, the present project is creating a "haptic pattern database" and investigates machine learning techniques to analyse the information contents of different haptic features and to extract identity and state information from haptic patterns. A closely connected goal are dynamic control strategies for contact movements with deformable or plastic objects, such as clay.
The spatio-temporal contact pattern during manipulation is a valuable source of information about object identity and object state, especially in uncertain environments. Using a bimanual robot manipulator setup with two 256 "pixel" touch sensor arrays, the present project is creating a "haptic pattern database" and investigates machine learning techniques to analyse the information contents of different haptic features and to extract identity and state information from haptic patterns. A closely connected goal are dynamic control strategies for contact movements with deformable or plastic objects, such as clay.